
the Consortium
Participating member states






Participating industry partners






Division of work
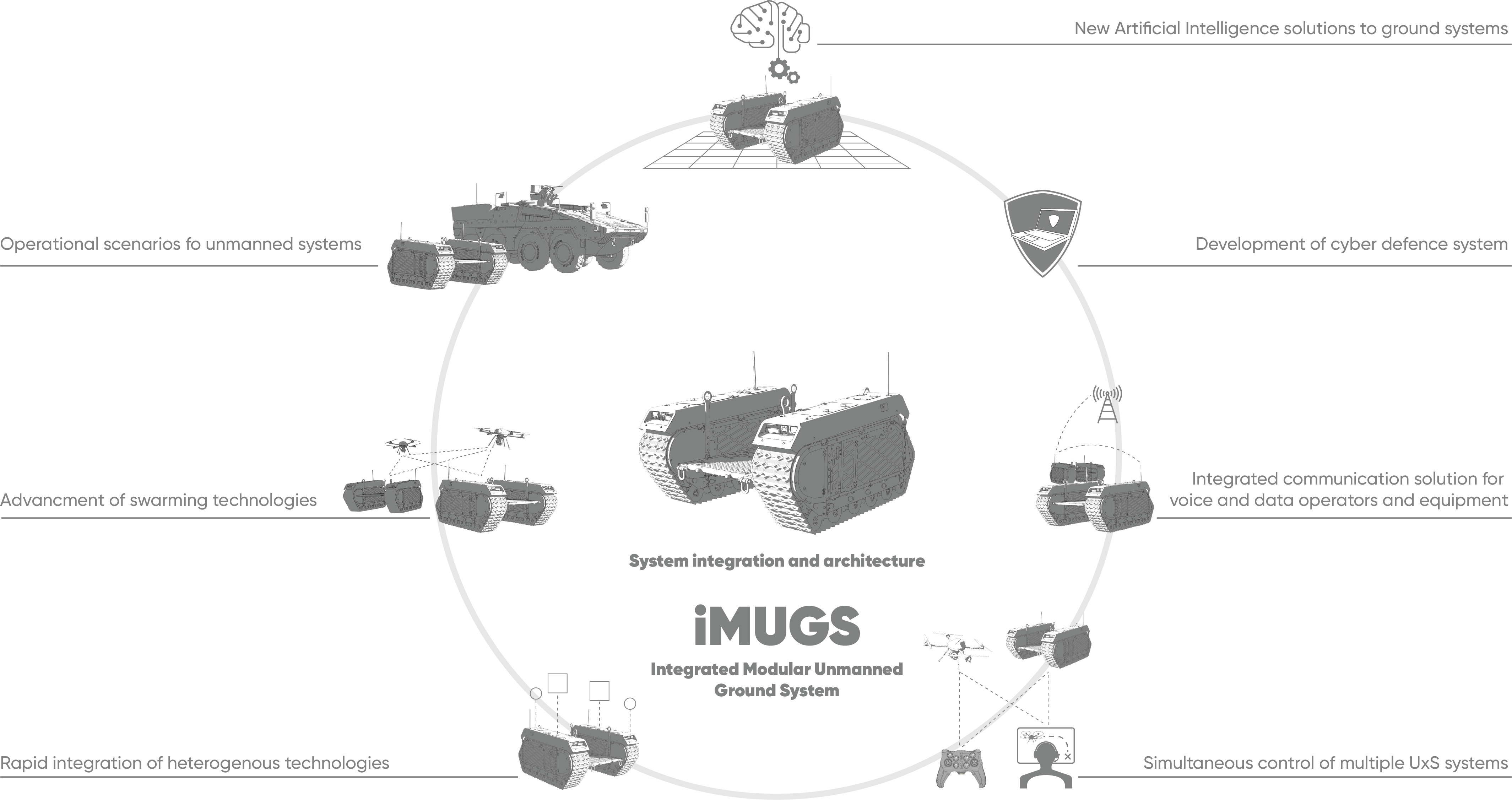
The iMUGS project was divided into six subprojects that were pearheaded by consortium members with the most expertise in those fields:
SUBPROJECT-1 SYSTEM INTEGRATION
Participants: Milrem Robotics
- Rapid integration of heterogeneous technologies.
- Open, modular, interoperable, standards-based system architecture and specifications encompassing operational and payload safety and cyber security.
- Standards based interfaces between subsystems, payloads and the architecture specification (STANAGs, NAFv4, NATO General Vehicle Architecture).
- Optimized towards production scalability of the systems (upgradeability; mobility platform, payload (incl. sensors) and communication agnostic architecture).
- Exposing system capabilities to users for enabling operational assessment and concept definitions.
- Operator centric (HIL/HOL) functionality demonstrated to end-users in relevant environment.
SUBPROJECT-2 AUTONOMY
Participants: Safran, Milrem Robotics, Nexter, Diehl
- Modular and cyber secure backbone for autonomous safe architecture scoping existing standards.
- Safe and secured autonomy solution integrated (UGV integration and sensors integration).
- Algorithms for selected use-cases (ISR, CASEVAC etc.).
- Addressing safety of autonomous functions.
- Enhancing navigational and mission level autonomy.
SUBPROJECT-3 CYBER SECURITY
Participants: Talgen
- Cyber Defence System capable of detecting and responding to cyber-attacks.
- Capable of autonomously detecting a compromise or an attack against onboard components.
- Detection of cyber-attacks from other entities in the same communication network, components compromised in the supply chain and attempts to load malicious code onto the system through physical exploitation.
SUBPROJECT-4 COMMUNICATIONS
Participants: Bittium, LMT
- Secure and scalable multiple-channel network communications.
- Capable of deploying both commercial and tactical mesh network technologies, with support to swarming.
- Secure network services for mobile Virtual Private Network (VPN) and Mobile Device Management (MDM).
- Communications can be routed over multiple channels (e.g. commercial/tactical networks seamlessly.
- Detection of jamming and localization of the jammer.
- Resistance to defined jamming (tactical mesh / Vehicle to Vehicle (V2V) communications).
SUBPROJECT-5 SWARMING
Participants: Royal Military Academy, dotOcean, Insta
- Architectures, methods and algorithms to optimize a multi-agent system against multiple objectives.
- Capability to solve multi-objective problems and perform multi-objective missions.
- Local and global approaches.
SUBPROJECT-6 COMMAND, CONTROL, AND INTEROPERABILITY
Participants: GMV, Sol.One
- Interoperability and standardization of interfaces with existing Command and Control (C2) as well as C4I and Battlefield Management System (BMS) and databases.
- All relevant subsystems can interface to the communication system and transfer IP-data transparently over the communication system.
- Control and Data Model specific to UAV and UGV systems.
- A reconfigurable land and air vehicle control and user C2, interface definition and prototyping.
SUBPROJECT-7 MANNED-UNMANNED TEAMING
Participants: KMW, Nexter, Milrem Robotics
A study with the goal of the development of military operational scenarios for UGV, which can be used as global definitions for a set of ConOps master scenarios, based on:
- workshops together with the participating nations.
- build-up of a simulator.
- virtual and constructive simulation of Krauss-Maffei Wegmann extended with models of UGV and UAV.
- participation in the iMUGS demonstrations with vehicles from Krauss-Maffei Wegmann.
- The analysis of deployment methods with already existing means of transport for UGV and to describe requirements on the deployment.